Chapter 1: Physical AI Foundations and Embodied Intelligence
Chapter Overview
Welcome to the exciting world of Physical AI! This chapter is your gateway to understanding how we can build intelligent systems that don't just live in the digital realm, but can perceive, reason, and act in the physical world. We'll explore the fundamental concepts that bridge the gap between artificial intelligence and robotics, and discover why the principles of "embodied intelligence" are crucial for creating the next generation of smart machines. By the end of this chapter, you will understand the core challenges and opportunities in Physical AI, and be ready to dive into the "nervous system" of modern robots: the Robot Operating System (ROS 2).
From Digital AI to Physical AI
For decades, Artificial Intelligence has lived inside computers. From playing chess to translating languages, AI has excelled in the clean, predictable world of data. But what happens when AI needs to interact with the messy, unpredictable physical world? This is the realm of Physical AI.
Limitations of Digital-Only AI
Digital AI systems, like a chatbot or a recommendation engine, are incredibly powerful, but they are fundamentally disembodied. They don't have to deal with the laws of physics, sensor noise, or the consequences of a misplaced decimal point in a motor command. Their world is one of bits and bytes, not atoms and forces.
The Transition to Physical Agents
Physical AI is about endowing machines with the ability to perceive, reason, and act in the physical world. This transition from virtual environments to physical agents introduces a host of new challenges:
- Uncertainty: The real world is not a perfect simulation. Sensors have noise, actuators have inaccuracies, and the environment is constantly changing.
- Real-time Constraints: A robot must often react in real-time to avoid collisions or maintain balance.
- Safety: A software bug in a physical system can have real-world consequences.
Embodied vs. Non-Embodied Intelligence
- Non-Embodied Intelligence: A large language model (LLM) like the one you might be interacting with now is a form of non-embodied intelligence. It processes vast amounts of text data but has no physical presence.
- Embodied Intelligence: A humanoid robot that can walk, open a door, and recognize objects is an example of embodied intelligence. Its intelligence is "grounded" in its physical body and its interactions with the environment.
Embodied Intelligence Fundamentals
Embodied intelligence is the idea that intelligence is not just about processing information, but is shaped by the physical body and its interaction with the environment.
Definition and Historical Context
The concept of embodied intelligence has its roots in the work of researchers like Rodney Brooks, who argued against the traditional "sense-plan-act" model of AI in favor of a more behavior-based approach. The core idea is that intelligence emerges from the dynamic interaction between an agent's body, its sensors, its actuators, and its environment.
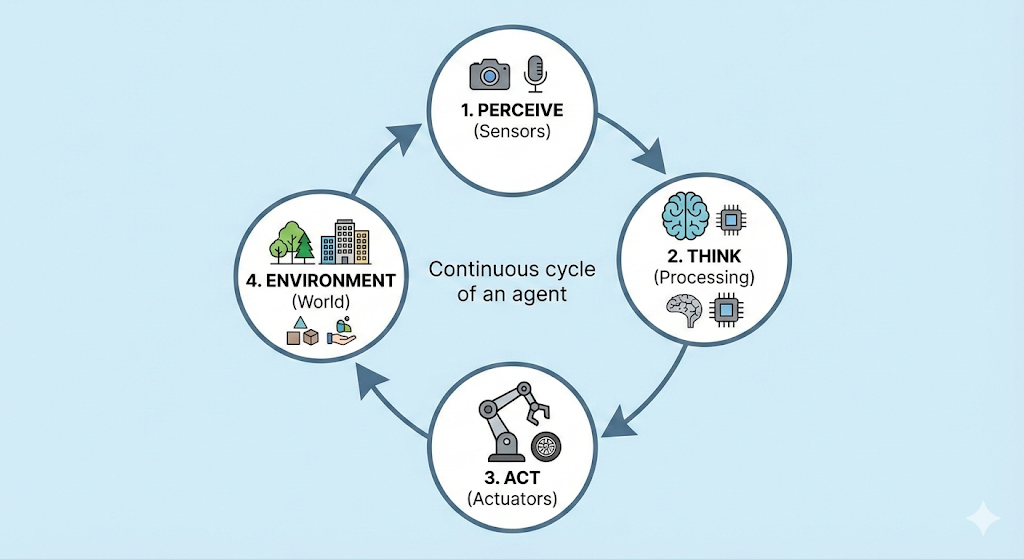
The Perception–Action Loop
The perception-action loop is a fundamental concept in embodied intelligence. It describes the continuous cycle of an agent:
- Perceiving the environment through its sensors.
- Thinking or processing that information to make a decision.
- Acting on the environment using its actuators.
- The action changes the environment, which in turn affects the next perception, and the loop continues.
The Role of the Body, Sensors, and Environment
In embodied AI, the body is not just a passive container for the "brain." The physical characteristics of the body—its size, shape, and degrees of freedom—constrain and enable different forms of intelligence. Similarly, the sensors determine what can be perceived, and the environment provides the context for all interactions.
Physical Constraints
Embodied agents must contend with the challenges of the physical world:
- Noise: Random fluctuations in sensor readings.
- Latency: The delay between when a sensor reading is taken and when an action is executed.
- Uncertainty: The agent never has a perfect model of the world.
- Dynamics: The laws of physics, such as gravity and momentum, govern all actions.
Humanoid Robots as Physical AI Systems
Humanoid robots are one of the most compelling examples of Physical AI. Their human-like form factor is not just for aesthetics; it's a deliberate design choice for robots that need to operate in human-centric environments.
Why Humanoid Form Factors Matter
The world is built for humans. From door handles to staircases, our environment is tailored to the human body. A humanoid robot can, in theory, navigate and interact with this world with the same ease as a person.
Overview of Humanoid Robot Components
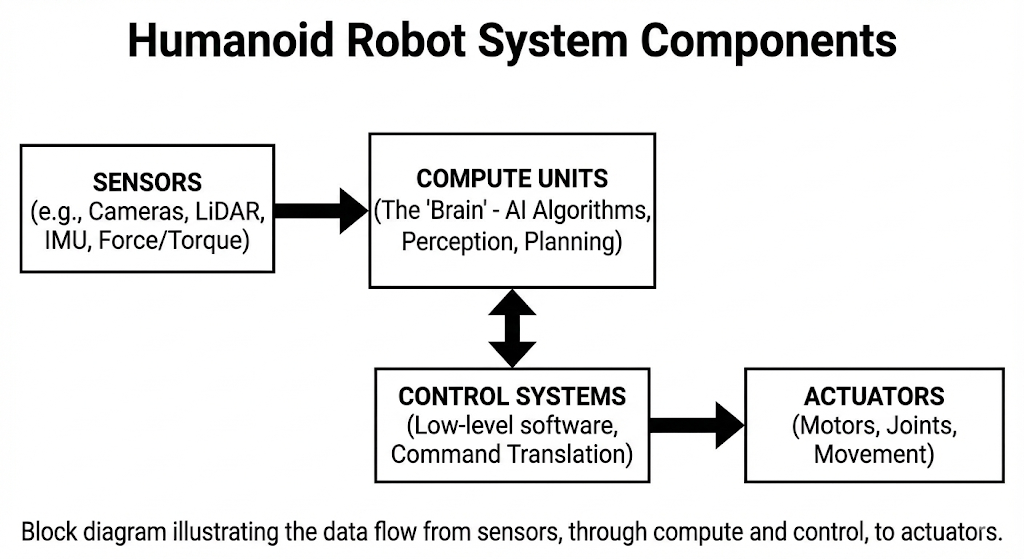
A humanoid robot is a complex system of systems. Here are the key components:
- Sensors: The robot's "senses." These include cameras (vision), LiDAR (depth perception), IMUs (balance), and force/torque sensors (touch).
- Actuators: The robot's "muscles." These are the motors and joints that enable movement.
- Control Systems: The low-level software that translates high-level commands (e.g., "walk forward") into the precise sequence of motor commands needed to execute the movement.
- Compute Units: The "brain" of the robot, where the AI algorithms for perception, planning, and decision-making run.
The Robotic Nervous System Analogy
A useful way to think about the software architecture of a robot is to draw an analogy to a biological nervous system.
- Sensors are like sensory neurons, collecting information from the environment.
- Controllers and planners are like the brain, processing information and making decisions.
- Actuators are like muscles, executing the decisions.
- Communication between these components is like neural signaling.
Just as a nervous system needs to be highly coordinated, a robot's software system needs a robust way to manage all this communication. This is where a robotic middleware like ROS 2 comes in. It acts as the central nervous system, ensuring that the right information gets to the right place at the right time.
Challenges in Physical AI
Building intelligent physical systems is incredibly challenging. Here are some of the key hurdles that researchers and engineers face:
- Real-time Constraints: Many robotic tasks, like balancing, require the system to react in fractions of a second.
- Safety and Robustness: A physical AI system must be safe to operate around humans and robust to unexpected events.
- Sim-to-Real Gap: Models and algorithms developed in simulation often fail to transfer to the real world due to the "reality gap."
- Scalability and Modularity: As robots become more complex, their software needs to be scalable and modular to manage the complexity.
- Human–Robot Interaction: Designing intuitive and safe ways for humans to interact with intelligent robots is a major challenge.
Chapter Summary and Key Takeaways
In this chapter, we've journeyed from the world of digital AI to the exciting frontier of Physical AI. We've seen that intelligence is not just about computation, but is deeply intertwined with the physical body and the environment.
Key Takeaways:
- Physical AI is about creating intelligent agents that can perceive, reason, and act in the physical world.
- Embodied Intelligence is the idea that the body, sensors, and environment are integral to intelligence.
- The Perception–Action Loop is the fundamental cycle of interaction for an embodied agent.
- A Robotic Nervous System (like ROS 2) is essential for coordinating the complex interplay of sensors, controllers, and actuators.
With this foundational understanding, you are now ready to explore the specifics of the robotic nervous system in the next chapter, where we dive into the core concepts of ROS 2.
Practice & Reflection
- Conceptual Question: Explain in your own words the difference between Physical AI and traditional AI.
- Thought Experiment: Imagine a simple robot whose only goal is to find and move towards a light source. Describe its perception-action loop. What are its sensors, actuators, and what is the "thinking" part of the loop?
- Reflection: How does the design of a robot's body (e.g., having wheels vs. legs) affect its intelligence?